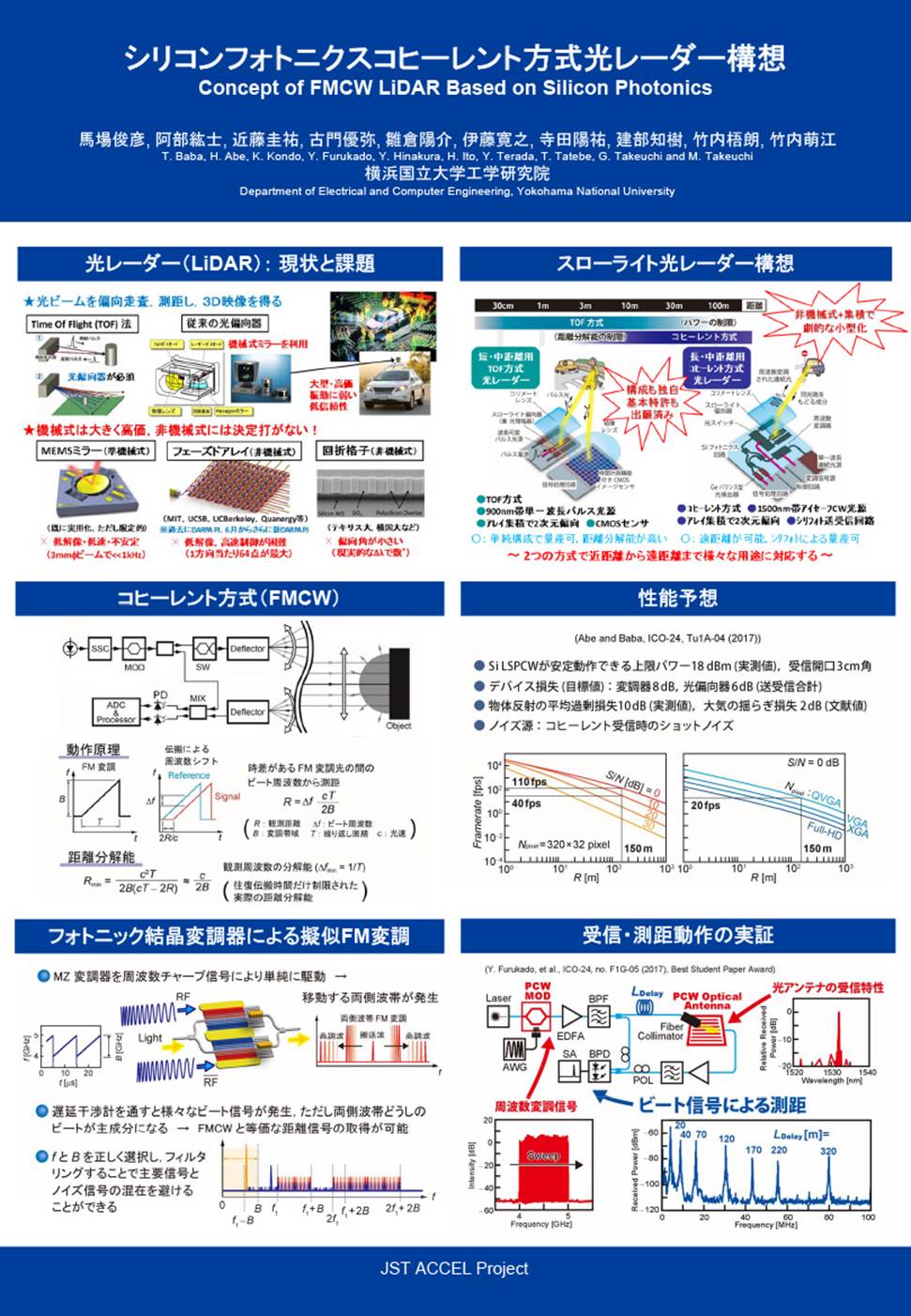
コヒーレント方式光レーダー構想: 光レーダー(LiDAR)は周囲の物体までの距離を計測し,周囲の空間の情報を3次元的に取り込むセンサです.古くは物体の計測や気象レーダーなどで使われてきました.近年,これを自動運転システムやロボットの眼として利用する動きが活発になり,世界的に研究が盛んになっています.ただし従来は光ビームを掃引する光偏向器が機械式だったため,光レーダー全体の小型化や低コスト化,高速動作,移動体上での安定な動作が困難でした.本研究は科学技術振興機構ACCELプロジェクトの援助を得て,非機械式スローライト偏向器を開発し,さらにこれを組み込んだ切手サイズの光レーダーを目指しています.